内容はテキストの誌面に沿って進めますが、講座では、紙面ではお伝えできなかったことも含めて、進めていきます。
特に1日目は、ハードウェアが初めての人向けに、ブレッドボートの使い方や基本的な電子部品の知識等も、解説します。
■カリキュラム
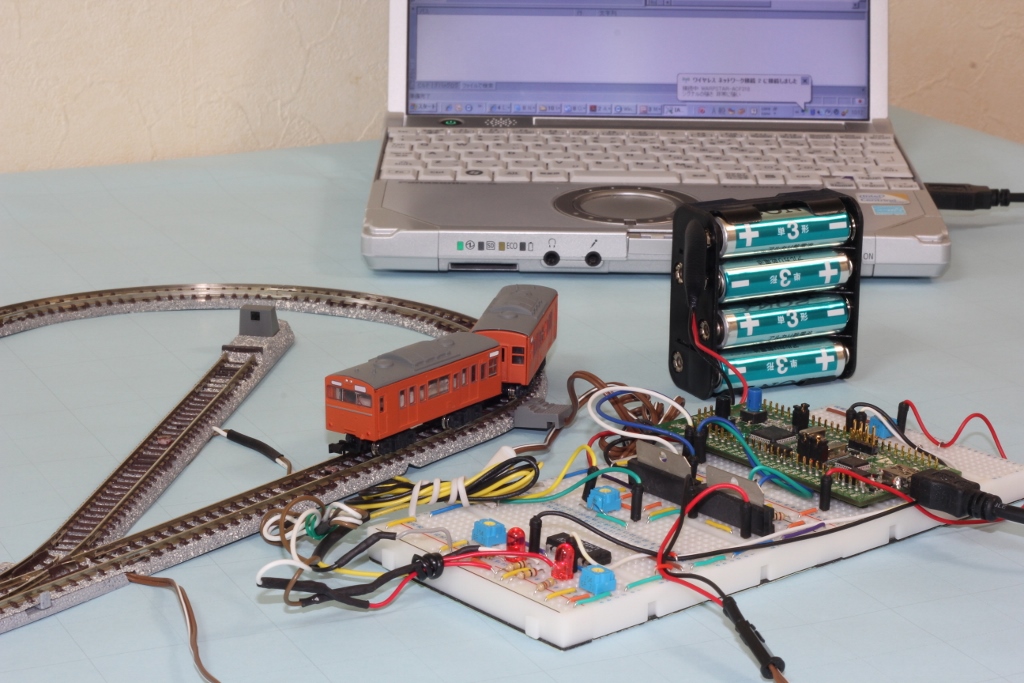
鉄道模型を素材として,ARMマイコン(STM32)を使った制御を実習します。
各回の内容と目標を列挙します。
■1回目(第1章~第3章前半)
内容 ARMマイコンの概要・開発環境の準備・LEDを点滅させてみる
目標 ARMマイコン(STM32)の概要を理解する
ブレッドボートの使い方や基本的な電子部品の知識を身に付ける
「EWARM v6.21」無償評価版(IARシステムズ)をノートPCにインストールし、開発環境を整える
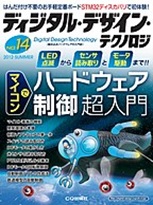
STM32ディスカバリのライブラリを使用して、マイコン基板搭載のLED出力を体験する。

■2回目(第3章後半~第6章)
内容 スイッチ入力・DCモータの動かし方・光センサの読み取り方
目標 STM32F10xペリフェラルライブラリを使用して、LEDやSWからの入出力を体験する。
ソフトウェアによるスイッチ入力のチャタリング対策を学ぶ。
DCモータドライバIC回路をを実装して、DCモータの動かし方を学ぶ。
光センサ(CDS)とオペアンプ回路を実装して、物体を検知する。
■3回目(第7章~第8章)
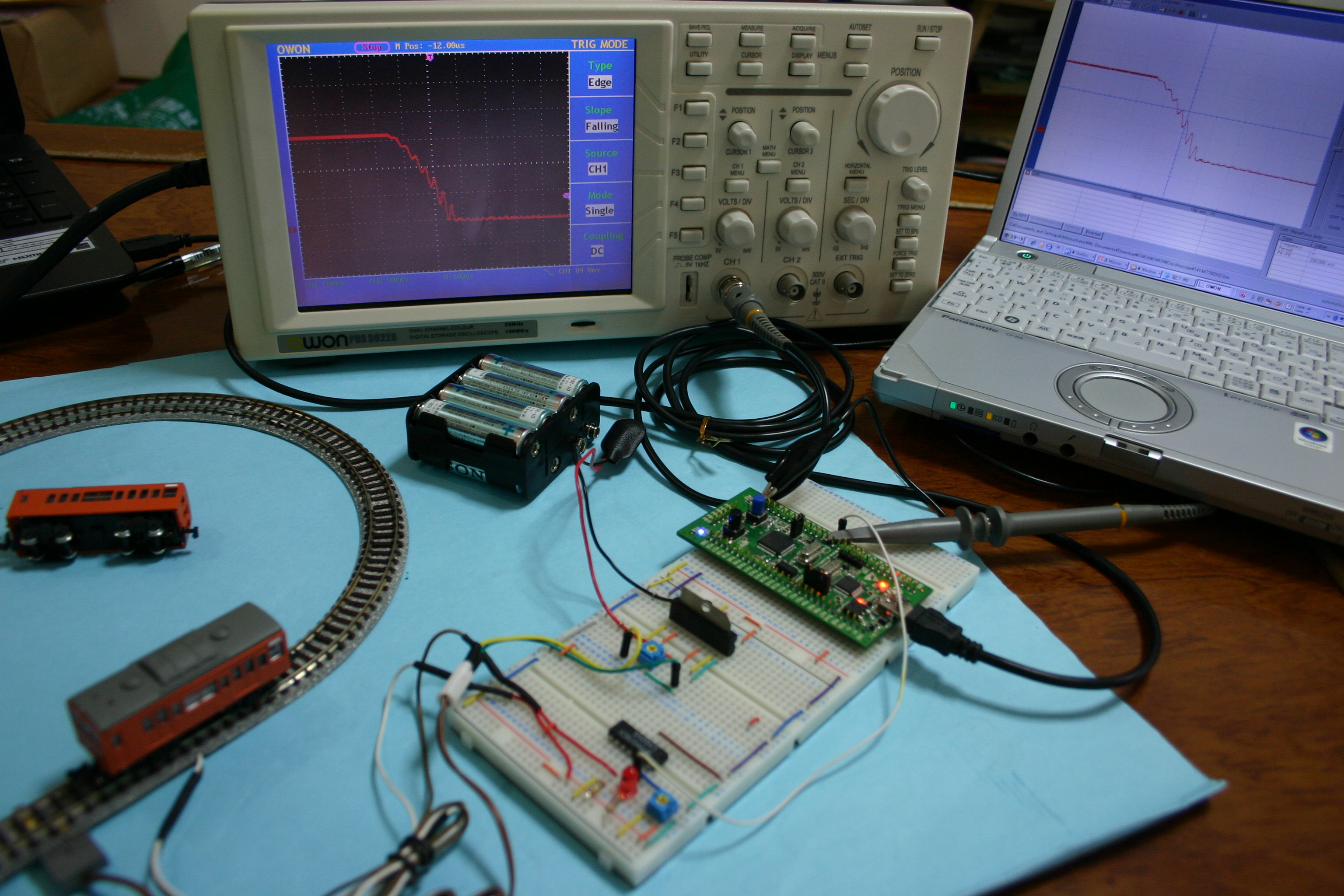
内容 タイマを使ったPWM信号の生成・割り込みの基本・A-D変換の基礎
目標 割込みとSysTickタイマの使い方を学ぶ。
PWM信号を生成して、DCモータの速度を制御する。
ノイズ対策を体験する。
■4回目(第9章~第10章)
内容 自動制御プログラムの設計と
ソレノイドの制御・誤動作対策
目標 ステート・マシンと状態遷移図について理解を深め、
制御プログラムの設計方法を学ぶ。
ソレノイドの制御やフェールセーフの考え方を学ぶ。
全体のシステムを組み上げ、ポイント付のレイアウトで模型を動作させる。